Case study
活用事例
水面移動式ボート型ドローン を用いた3次元点群計測
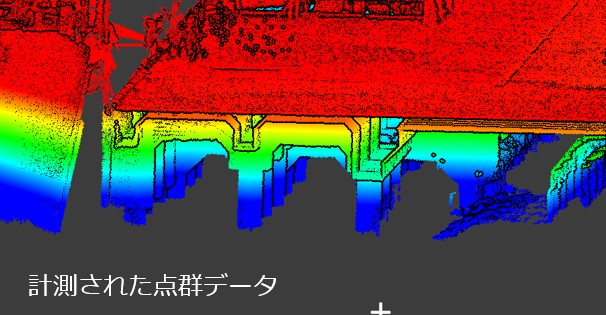
本技術は、水面上を全方向に移動できるボート型ドローンに設置されたレーザスキャナにより3次元点群を取得する技術です。 このシステムにより空からのドローンでは計測困難な橋梁下や水際洗堀によりオーバーハング状になった護岸形状を水面上から計測することができます。計測データは、リアルタイムで手元のモニターで確認できデジタルSDカードに保存されます。
Case
事例
ボート型ドローン・スペック

船体・駆動システム
【船 体】1195mm×1030mm×1150mm(全長、幅、高)
【スクリュー】Bluelobotics0.7馬力
【バッテリー】10000mAh 148Wh4セル 2個
【継続運航】45分
【受信機】 SIYI MK32 2.4GHz
航行システム
【測位GPS】Holybro DroneCAN H-RTK F9P Rover
【ドローン操縦器】 SIYI MK32 2.4GHz
画像伝送システム
【カメラ】 SIYI A8mini(4K)
【送信機】 SIYI MK32 2.4GHz
【モニタ受信機】 SIYI MK32 2.4GHz
【バッテリー】 SIYI A8mini(4K)
SLAM LiDAR HOVERMAP STX スペック

【照射数】 64万ポイント/秒
【照射角】 360°
【照射距離】 300m
【位置精度】 ±5mm ~25㎜
【カラー】 360°カメラ
【障害物検知】 2㎜ワイヤーまで検知
【自動航行装置】AUTONOMY
Demonstration -実証
老朽化した桟橋の維持のため支柱間に新しく支柱の増強を計画。資料がないため現在の支柱位置を特定することを目的として実施。


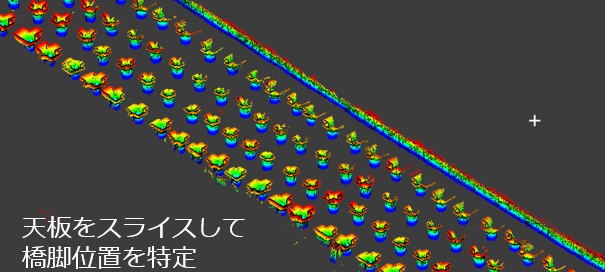
データ解析により支柱位置の座標が取得できた。